In questa guida spiegheremo il controllore di volo o anche detto flight controller forniremo informazioni riguardanti i diversi tipi nel mercato e la gamma di possibili integrazioni di funzionalità, in modo che tu possa scegliere il controllore di volo più adatto alle tue esigenze.
Il Flight Controller, è il cuore di un Drone e controlla la maggior parte dei componenti elettrici di bordo con l’assistenza di un microprocessore simile ad arduino e una serie di sensori.
COS’E’ UN CONTROLLORE DI VOLO?
Un controllore di volo (noto anche come FC) è il CERVELLO DEL DRONE.
Fondamentalmente un controllore di volo è un circuito stampato con sensori che rileva i cambiamenti di orientamento del tuo drone. Riceve anche i comandi dell’utente e controlla i motori che gli permette di mantenere il drone in aria.
Quasi tutti i controllori di volo hanno sensori di base come Gyro (Giroscopi) e Acc (Accelerometro). Alcuni FC potrebbero includere sensori più avanzati come il barometro (sensori di pressione barometrica) e il magnetometro (bussola).
Il controller di volo è anche un HUB per molte altre periferiche, come GPS, LED, sensore Sonar, ecc.
I controller di volo di un drone da corsa sono in rapida evoluzione: più piccoli, utilizzando processori e hardware migliori e sempre più funzioni integrate.
FIRMWARE
Il firmware configura la scheda con il programma e le impostazioni necessarie per gestire e controllare il drone.
Per programmare FC moderno normalmente può essere configurato tramite software su un computer, uno smartphone o persino dal tuo controller radio.
L’interfaccia USB consente il collegamento tra la FC e il suo configuratore consentendo all’utente di modificare le impostazioni delle schede comprese le velocità, i PID, la configurazione del ricevitore, l’impostazione failsafe e le modalità di volo. Per tutte le FC, si consiglia di aggiornare l’ultimo firmware disponibile in quanto di solito ha caratteristiche di volo migliorate e una quantità ridotta di problemi software.
FC configuratori: Betaflight, Cleanflight e occasionalmente, Raceflight o KISS (se compatibile).

PROCESSORE
I controllori di volo sono in continua evoluzione con i loro processori sempre più veloci in questo momento le cpu più utIlizzate sono : F1, F3, F4, F7.

Essenzialmente, maggiore è il numero dopo la “F”, più veloce sarà il microprocessore e maggiore sarà la sua efficenza.
La F1 sta diventando troppo lenta per eseguire gli ultimi firmware di FC e non è consigliabile acquistarla poiché presto non sarà supportata. Le schede F3 possono attualmente eseguire gli ultimi firmware dei controllori di volo anche se il microprocessore è di conseguenza più lento di un F4 a F7 durante la lettura e la risposta agli ingressi del sensore. Questo tempo di lettura e di risposta è noto rispettivamente come frequenza di aggiornamento del giroscopio e frequenza del loop PID.
COS’E’ UART?
UART sta per Universal Asynchronous Receiver / Transmitter .
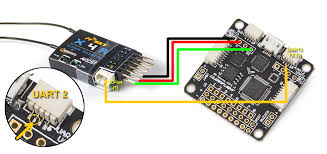
UART è la porta seriale hardware che consente di collegare dispositivi esterni al controllore di volo. Per esempio, ricevitori radio seriali, telemetria, trasponder di gara, controllo VTX ecc.
Ogni UART ha due pin, TX per la trasmissione di dati e RX per la ricezione.
IL NUMERO DI UART SU UN FC
Potresti o non potresti aver bisogno di molte UART, ma più ne hai, più è flessibile e più a prova di futuro.
Il numero di UART su una FC dipende dal design della scheda e dal processore utilizzato. Ad esempio, F1 FC normalmente ha solo 2 UART, mentre F3 e F4 possono avere tra 3 e 5 e F7 può anche avere 7 o più.
GYRO SENSOR – L’IMU
Il compito di un sensore IMU è misurare il movimento e l’orientamento del drone . Un IMU contiene sia l’accelerometro che il giroscopio, ma poiché la maggior parte dei piloti di FPV volano solo in modalità Acro, spesso spegniamo l’accelerometro. E quindi normalmente ci riferiamo all’IMU semplicemente come Gyro.
Attualmente l’IMU più utilizzato è l’ MPU6000 in quanto supporta frequenze di campionamento fino a 8 KHz e si è dimostrato uno dei più solidi IMU contro il rumore. Il consenso generale è di evitare MPU compresi MPU6500 e MPU9250 che sono più rumorosi nonostante la maggiore velocità di campionamento.
Il giroscopio più veloce è un’arma a doppio taglio. con segnale e potenza puliti, ci si può aspettare che la serie ICM abbia prestazioni migliori e più uniformi rispetto a MPU6000 a 32 KHz. Tuttavia con ESC rumoroso, motore e quad con oscillazione, le prestazioni del giroscopio ICM saranno molto peggiori rispetto a MPU6000.
Ad esempio, ICM20602 su Raceflight Revolt V2 o ICM20689 su Kakute F4 , entrambi possono funzionare a 32 KHz. Tuttavia, è stato riportato che questi IMU sono più suscettibili al rumore rispetto al vecchio MPU6000, pertanto questi FC richiedono generalmente condensatori di montaggio e filtro per ridurre la quantità di rumore che arriva al Gryo.
Iniziamo a vedere FC con il Gyro “soft mount”, in pratica l’IMU è seduto su un pezzo di schiuma, per ridurre parte del rumore proveniente dai motori.
I2C E SPI
SPI e i2c sono i tipi di “BUS”, o protocollo di comunicazione tra il sensore IMU e il processore. Può avere un impatto significativo sull’efficacia della frequenza di campionamento e quindi sul tempo di ciclo massimo del controllore di volo.
Il BUS preferito è SPI , che consente di eseguire Gyro ad una frequenza di aggiornamento molto più alta rispetto a I2C che ha un limite di 4KHz
altre funzionalità che potresti trovare sui controllori di volo
Altre funzionalità che potresti trovare sui controllori di volo
Barometro / Mag (bussola): sensori aggiuntivi sono meno importanti per i corridori e mini quad
VTX integrato: il vantaggio principale è il risparmio di peso e la compattezza complessiva, alcuni addirittura consentono di modificare le impostazioni VTX direttamente dalla FC.
OSD integrato :questa funziona essere configurato, se ti piace OSD questa funzione è un must
Supporto RX: assicurarsi che FC supporti il tipo di protocollo del ricevitore radio che si intende utilizzare, ad esempio PWM, PPM, SBUS, Spektrum Satellite e così via
Opzioni AIO : Il controller di volo “Tutto in uno” ha tutto il necessario integrato in una singola scheda, come FC, ESC, PDB, RX e così via. Lo svantaggio è che se qualcosa fallisce, è più probabile che tu debba sostituire l’intera configurazione
Supporto per transponder a infrarossi: consente di utilizzare i rilevatori IR con FC direttamente per misurare il tempo sul giro in alcuni eventi di gara
CONCLUSIONE
Con queste informazioni, ora dovresti essere in grado di selezionare un flight Controller ideale per il tuo drone.
Ultimo consiglio ma non meno importante , quando si collega un FC, si consiglia sempre di avere una stampa o un’immagine dello schema elettrico a portata di mano e di aver guardato alcuni video sull’installazione FC per assicurarsi che si interfaccia correttamente tutti i componenti esterni a la FC.
CONSIGLIATI DALLO STORE DI DRONE24HOURS
Potrebbe piacerti anche:
Ricevi email riservate ai membri, coupon di sconto su prodotti relativi ai Droni e i consigli di Drone24hours.com
[mc4wp_form id = “838”]
[/ vc_column_text] [/ vc_column_inner]